If a robot’s perception is poor, it is first of all not safe, but it also forces operators to step in, eroding uptime, reducing efficiency, and harming the user experience. Good perception is what truly enables safe, seamless, and productive autonomy.
Every intervention is a failure of perception – our technology minimizes these moments.
SOLUTION FEATURES
A Certifiable Safety Solution
Our configurable software solution uses off-the-shelf hardware for autonomous agricultural machines. It is designed to integrate seamlessly with your existing autonomous control system, adding a critical layer of safety without disrupting your current operations.
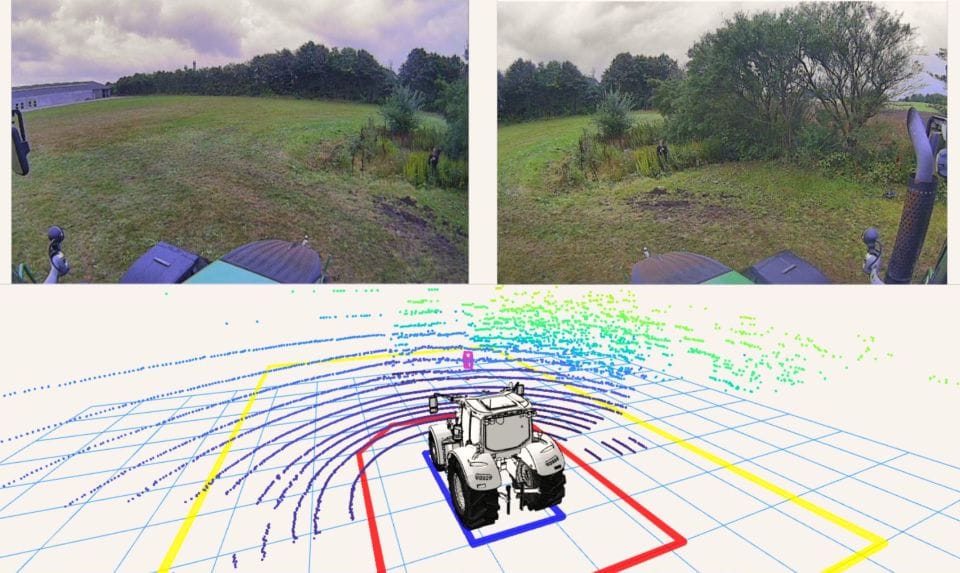
Leveraging sensor fusion for obstacle detection.
The system integrates on top of your autonomous control stack, adding a safety layer that accurately detects static and dynamic obstacles in the field. Continuous 2D and 3D scanning ensures redundancy and high-resolution spatial awareness, enabling the robot to avoid collisions. This is critical for maintaining operational reliability in complex agricultural environments.
The system is designed to meet functional safety requirements up to AgPL d, with typical applications ranging from AgPL a to d, in line with ISO 25119.
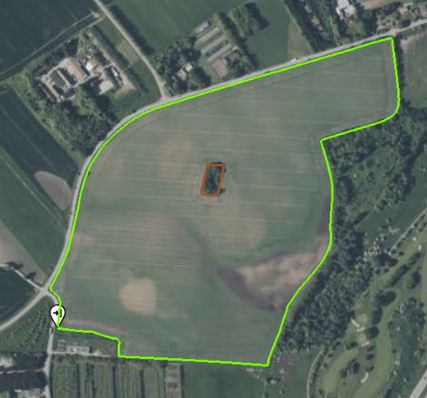
A virtual fence around the field based on GNSS to ensure the robot does not leave the field.
Our Geofence Integrity Service provides a continuously monitored, high-integrity position and its associated uncertainty for an agbot. This information is used to:
– Dynamically assess the agbot’s proximity to predefined geofence boundaries.
– Trigger appropriate safety actions if the risk of boundary violation becomes unacceptable based on the current integrity level and vehicle state.
– Enhance operational availability by allowing continued operation in GNSS-degraded areas where traditional systems might halt.
– Generate alerts upon detection of positioning signal anomalies or critical system failures.
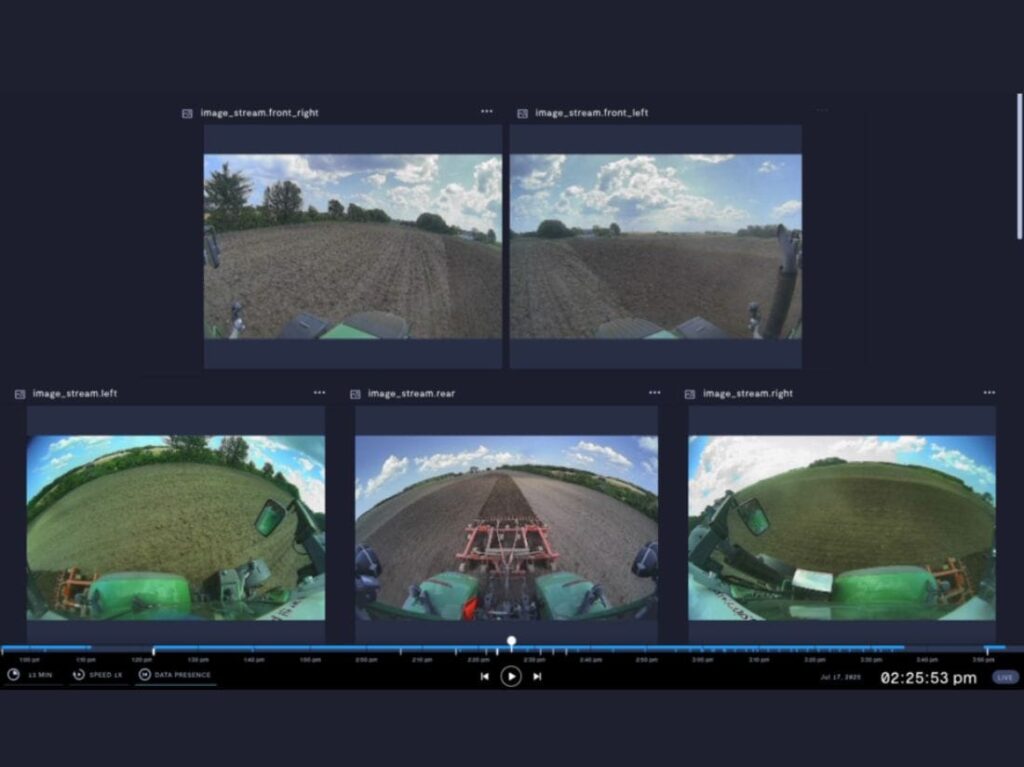
Stay connected to your agbot from anywhere with remote access.
In case of an alert, users can instantly view the live video feed and manage the situation remotely. Whether it’s adjusting settings, confirming conditions, or resuming operations, most actions can be handled directly through the remote interface—saving time and keeping your workflow smooth. With real-time visibility and control, you’re always just a click away from your field.
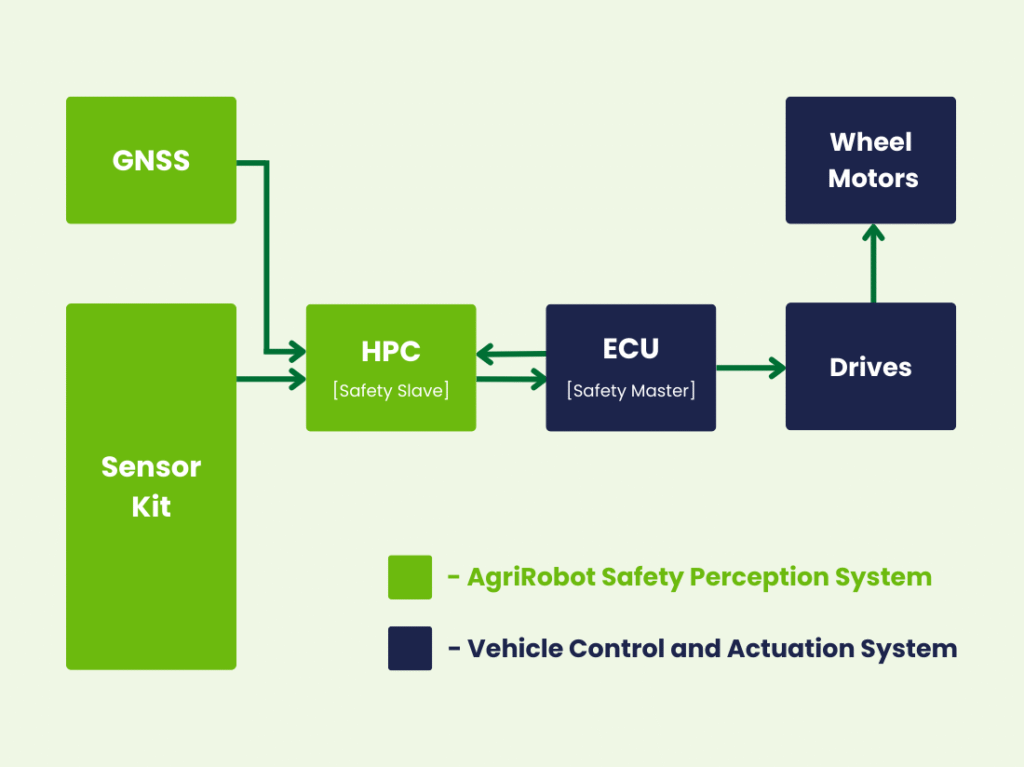
Machine integration refers to our high-level system architecture.
The high-level system architecture involves multiple coordinated subsystems working together. Sensing is achieved through multiple sensor modalities that provide environmental and positional information. A sensing subsystem preprocesses the incoming data streams, which are then handled by the processing unit responsible for executing real-time obstacle detection and geofencing algorithms. The localization subsystem integrates inputs from various sensors to estimate the system state and its associated confidence levels. This estimated position and uncertainty are evaluated by the boundary monitoring subsystem, which compares them against virtual boundaries to determine if a response is necessary. The actuation interface communicates any identified safety events to the vehicle control systems for appropriate response execution.
Our perception systems are developed with cyber security in mind.
Ensuring that both hardware and software are protected against evolving threats. Our approach aligns with emerging standards like ISO/CD 24882 and meets the expectations of upcoming EU regulations, including the Cyber Resilience Act and the Machinery Regulation. With secure development practices, encrypted over-the-air updates, and lifecycle protection, we ensure our machines stay resilient, reliable, and safe in the field today and into the future.
Supporting secure over-the-air (OTA) updates.
Keep your system current with the latest software improvements. These updates ensure your robot stays safe, protected from security threats, and performs at its best in the field. Farmers benefit from ongoing enhancements and new features without needing manual updates, keeping operations reliable and efficient throughout the season.
Increased Uptime
Improved Autonomous Performance
Driving Higher Market Acceptance and Adoption
OUR MISSION
Enabling Safe Autonomy
Our mission is to provide a safety system for agricultural robot manufacturers, so the robots operate reliably in the field without the need for constant human field oversight. Our technology empowers the agricultural sector to scale automation sustainably, even in remote or challenging environments.
We address the challenge of developing autonomous agricultural machines that can operate safely without requiring constant on-site human supervision.
Safety Compliance
Safety Compliance
Follow a structured, standards-based approach to addressing safety risks in autonomous systems—combining functional safety (ISO 25119) with the SOTIF framework to reduce uncertainty and complexity.
Time to Market
Time to Market
Faster development cycles by reduction of project risk complexity, faced while building a compliant system from scratch.
Reliability for Farmers
Reliability for Farmers
High machine uptime and dependable field performance, even in unpredictable or remote environments.
Operational Efficiency
Operational Efficiency
Smooth interoperability among diverse agricultural robotics systems and implements, enabling more productive and autonomous field operations.
Safety Compliance
Follow a structured, standards-based approach to addressing safety risks in autonomous systems—combining functional safety (ISO 25119) with the SOTIF framework to reduce uncertainty and complexity.
Time to Market
Faster development cycles by reduction of project risk complexity, faced while building a compliant system from scratch.
Reliability for Farmers
High machine uptime and dependable field performance, even in unpredictable or remote environments.
Operational Efficiency
Smooth interoperability among diverse agricultural robotics systems and implements, enabling more productive and autonomous field operations.