
FROM INTEGRATE TO SAFE
We partner with OEMs to develop robots that comply with safety standards while delivering dependable, intuitive performance for operators.
A complete solution for enabling autonomous and safe operation of agricultural vehicles. Together, they cover everything from sensor integration and intelligent perception to achieving the required levels of functional safety (FuSa) and safety of the intended funtion (SOTIF).
Simulation, design, integration and prototyping with the OEM


Detect as supervised product or steppingstone for the OEM to Safe


Compliant solution ready to scale with the OEM to farmers
A complete solution for enabling autonomous and safe operation of agricultural vehicles. Together, they cover everything from sensor integration and intelligent perception to achieving the required levels of functional safety (FuSa) and safety of the intended function (SOTIF).
Simulation, design, integration and prototyping with the OEM

Detect as supervised product or steppingstone for the OEM to Safe

Compliant solution ready to scale with the OEM to farmers
A complete solution for enabling autonomous and safe operation of agricultural vehicles. Together, they cover everything from sensor integration and intelligent perception to achieving the required levels of functional safety (FuSa) and safety of the intended funtion (SOTIF).
Simulation, design, integration and prototyping with the OEM
Detect as supervised product or steppingstone for the OEM to Safe
Compliant solution ready to scale with the OEM to farmers
Scenario-based safety process
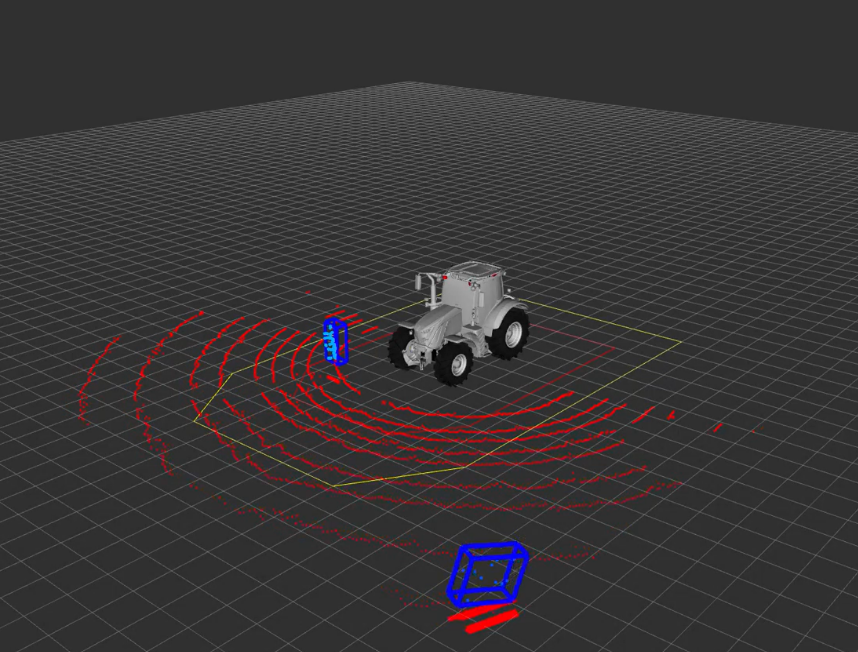
Integrate begins with discovery and feasibility analysis, gathering information about the OEM’s machine, operational design domain, and systems to define safety requirements. A digital twin is created to design the sensor kit and test perception algorithms. Communication between the safety system and the OEM’s controller is established and validated. The optimal sensor kit and placement are designed and tested in simulation and reviewed. Remote connectivity, data upload to cloud, and supervision tools are then set up and verified. Core obstacle detection software is deployed and configured using real-world data and geofencing is implemented and tested to ensure proper system response to virtual boundaries. It concludes with a report summarizing safety requirements, system architecture, verification results, and key integration artifacts.
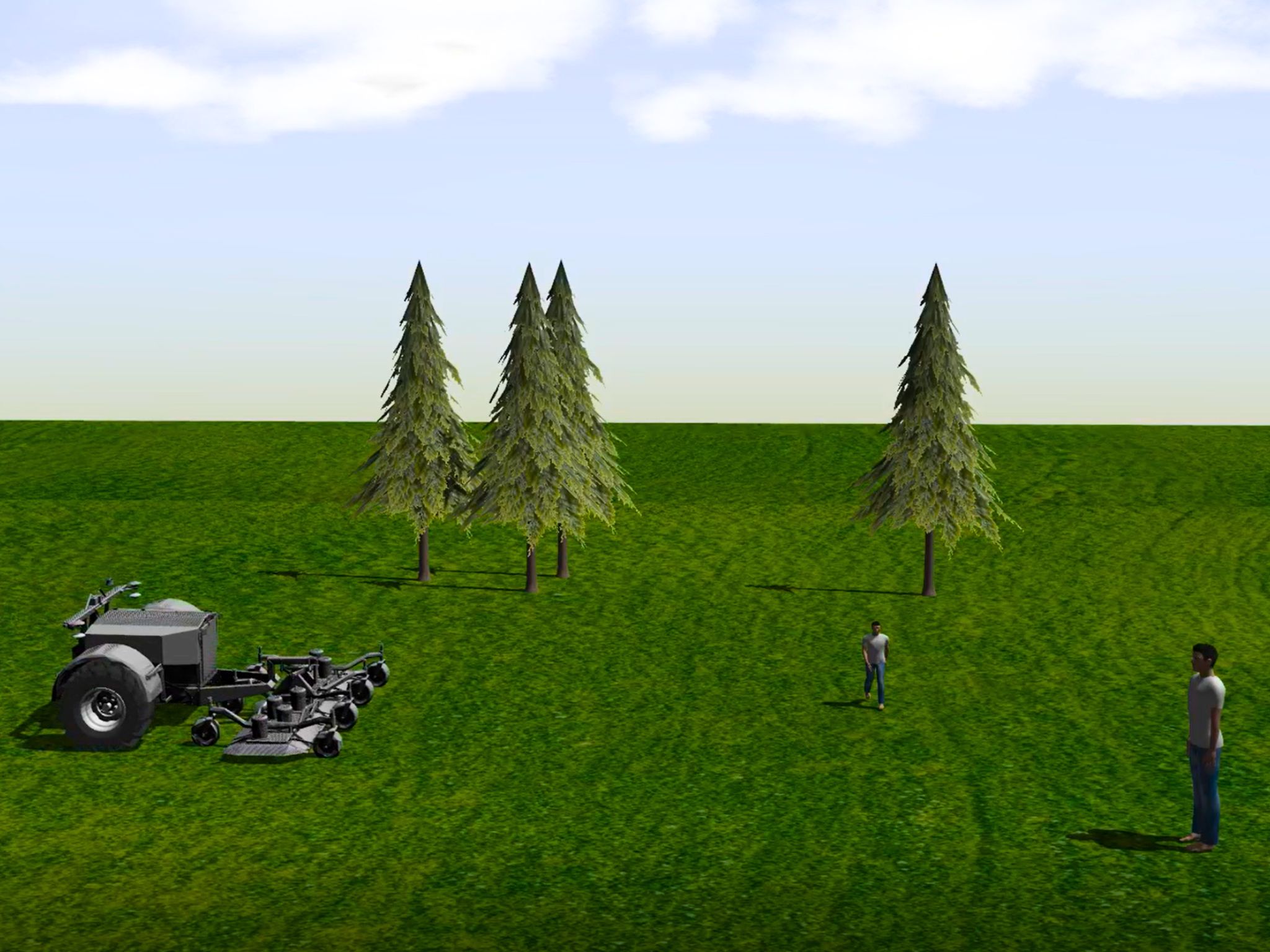
Integrate begins with discovery and feasibility analysis, gathering information about the OEM’s machine, operational design domain, and systems to define safety requirements. A digital twin is created to design the sensor kit and test perception algorithms. Communication between the safety system and the OEM’s controller is established and validated. The optimal sensor kit and placement are designed and tested in simulation and reviewed. Remote connectivity, data upload to cloud, and supervision tools are then set up and verified. Core obstacle detection software is deployed and configured using real-world data and geofencing is implemented and tested to ensure proper system response to virtual boundaries. It concludes with a report summarizing safety requirements, system architecture, verification results, and key integration artifacts.

Detect focuses on the completion, verification, and validation of the final safety solution, ensuring full compliance with all relevant safety standards and regulations before entering production.
It is the path from Integrate to Safe, as we continuously test and validate the machine with simulation, field tests and recorded data tests. During this phase, we apply the V-model safety process more rigorously, gathering all the relevant scenarios and implementing the corresponding test plans, running all the verification and validation processes.


This product focuses on the completion and validation of the final safety solution, ensuring full compliance with all relevant safety standards and regulations before entering production..


Safe represents the completion of the required functional safety performance level (AgPLr) based on HARA and that the performance of the safety functions reduces the residual risk to an acceptable level. This comprehensive package includes geofencing for in-field safety, remote override capabilities, over-the-air software updates, and adherence to industry standards. It also features real-time field data simulation and complies with ISO 12100, ISO 18497, and ISO 25119, ensuring both reliability and regulatory compliance in agricultural robotics. Post market release we continue to provide surveillance, software updates and traceability to ensure ongoing security and safety.

Safe represents the completion of the required functional safety performance level (AgPLr) based on HARA that the performance of the safety functions reduces the residual risk to an acceptable level. This comprehensive package includes AgPL up to level D, geofencing for in-field safety, remote override capabilities, over-the-air software updates, and adherence to industry standards. It also features real-time field data simulation and complies with ISO 12100, ISO 18497, and ISO 25119, ensuring both reliability and regulatory compliance in agricultural robotics. Post market release, we continue to provide surveillance, software updates and traceability to ensure ongoing security and safety.

We are adopting an automotive-inspired, scenario-based approach to enhance our safety processes and ensure Safety Of The Intended Function (SOTIF).
Establishes the foundational safety context by reviewing and clarifying the OEM-provided Hazard Analysis and Risk Assessment (HARA) and the initial Operational Design Domain (ODD) definition.
Focuses on the collaborative development and management of safety requirements (FSRs and TSRs), building upon the inputs from HARA and initial ODD.
Focuses on defining and aligning the system architecture for the safety system, by mapping the OEM's needs and existing design elements to the reference AgriRobot Safety System Architecture. This includes identifying key subsystems, defining performance levels, determining hardware categories (per ISO 25119), defining software components, conducting FMEA, and ensuring alignment with safety requirements.
Focuses on defining the building blocks for test scenarios (Tactical Maneuvers, ODD Context, OEDR Logic (expected response), Failure Modes) and using these, along with system requirements (FSRs), to develop a catalogue of abstract scenarios.
Focuses on defining a scenario-oriented approach for system and subsystem Verification and Validation (V&V), including test case definition, test environment preparation, planning for test execution, and considerations for results analysis.
Focuses on the definition, development, and management of safety documentation and supporting artifacts required throughout the safety lifecycle, according to ISO 25119. This includes formalizing key plans (Safety Management, Requirements Management, V&V), generating critical reports, developing the AR Safety Manual, and supporting the OEM's development of the overall Safety Case.
Establishes the foundational safety context by reviewing and clarifying the OEM-provided Hazard Analysis and Risk Assessment (HARA) and the initial Operational Design Domain (ODD) definition.
Focuses on the collaborative development and management of safety requirements (FSRs and TSRs), building upon the inputs from HARA and initial ODD.
Focuses on defining and aligning the system architecture for the safety system, by mapping the OEM's needs and existing design elements to the reference AgriRobot Safety System Architecture. This includes identifying key subsystems, defining performance levels, determining hardware categories (per ISO 25119), defining software components, conducting FMEA, and ensuring alignment with safety requirements.
Focuses on defining the building blocks for test scenarios (Tactical Maneuvers, ODD Context, OEDR Logic (expected response), Failure Modes) and using these, along with system requirements (FSRs), to develop a catalogue of abstract scenarios.
Focuses on defining a scenario-oriented approach for system and subsystem Verification and Validation (V&V), including test case definition, test environment preparation, planning for test execution, and considerations for results analysis.
Focuses on the definition, development, and management of safety documentation and supporting artifacts required throughout the safety lifecycle, according to ISO 25119. This includes formalizing key plans (Safety Management, Requirements Management, V&V), generating critical reports, developing the AR Safety Manual, and supporting the OEM's development of the overall Safety Case.
OUR SOLUTION
We address the challenge of developing autonomous agricultural machines that can operate safely without requiring constant on-site human supervision.
Follow a structured, standards-based approach to addressing hazards in autonomous systems—combining functional safety (ISO 25119) with the SOTIF framework to reduce uncertainty and complexity.
Faster development cycles by reduction of project risk complexity, faced while building a compliant system from scratch.
High machine uptime and dependable field performance, even in difficult and harsh environments.
Smooth interoperability among diverse agricultural robotics systems and implements, enabling more productive and autonomous field operations.
OUR SOLUTION
We address the challenge of developing autonomous agricultural machines that can operate safely without requiring constant on-site human supervision.

Follow a structured, standards-based approach to addressing hazards in autonomous systems—combining functional safety (ISO 25119) with the SOTIF framework to reduce uncertainty and complexity.
Faster development cycles by reduction of project risk complexity, faced while building a compliant system from scratch.
High machine uptime and dependable field performance, even in difficult and harsh environments.

Smooth interoperability among diverse agricultural robotics systems and implements, enabling more productive and autonomous field operations.